
Four wheel robot by Arduino(Uno)
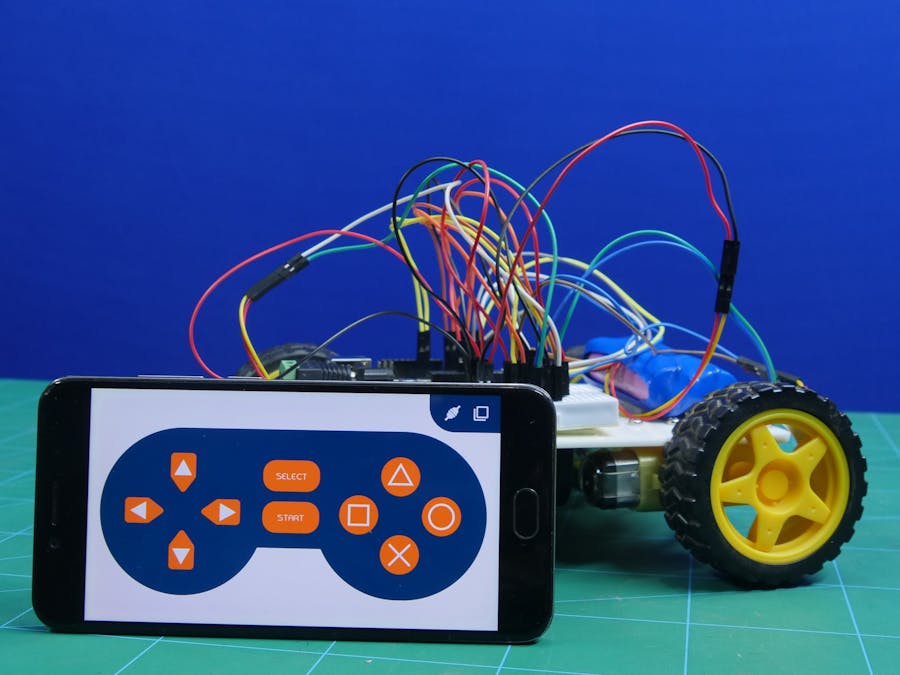
This project is gonna show you how you can make an awesome (DIY) 4-wheel robot which can be controlled by using your smartphone via mobile application.
SO…LETS GET STARTED !!! 👍👍👍
I will show you the exact road-map from which you can make an awesome DIY car and will be able to showcase your talent in front of professers & friends…
Components you needed to make your own (DIY) Arduino car
- An ardunio board
- bread-board
- jumper wire
- wheels
- motor driver
- bluetooth module
- two LEDs
- Glue gun
- Battery
The code you needed for Arduino
Copy and paste the code in your Arduino IDE
/*
* in this project we will be using HC-05 bluetooth module
* for arduino "UNO" use bluetooth module buadrate below 38400
*
* connection of bluetooth module with arduino
*
* HC-05 bluetooth module ----> arduino "UNO"
*
* Tx ----> 2
* Rx ----> 3
*
* Written by by Punit chotaliya, STEMpedia
* on 16 jan 2019
*
*/
//To include the GamePad module in the Arduino program, you have to
//include the following header:
#define CUSTOM_SETTINGS
#define INCLUDE_GAMEPAD_MODULE
//include Dabble app library
#include <Dabble.h>
#define motor1_en 10 // motor 1 enable pin
#define motor2_en 11 // motor 2 enable pin
#define motor1_dir1 4 // motor 1 input1 (InputA)
#define motor1_dir2 5 // motor 1 input2 (InputA)
#define motor2_dir1 6 // motor 2 input1 (InputB)
#define motor2_dir2 7 // motor 2 input2 (InputB)
void setup()
{
// put your setup code here, to run once:
Serial.begin(9600); // start serial communication using 9600 baudrate
Dabble.begin(38400); // Enter your bluetooth module baudrate
// NOTE : for arduino "UNO" use bluetooth module buadrate below 38400
for(unsigned int i=4;i<8;i++)
{
pinMode(i,OUTPUT); // declaring input pins of motor1 and motor2 as a output pin
}
pinMode(motor1_en,OUTPUT); // declaring enable pins of motor as a output
pinMode(motor2_en,OUTPUT);
}
void loop()
{
// put your main code here, to run repeatedly:
Dabble.processInput(); //To refresh the data that the arduino UNO got from the mobile app, you have to use the following line of code
if (GamePad.isUpPressed()) // if UP is pressed in the gamepad then move robot forward
{
Serial.print("UP");
forward();
}
else if (GamePad.isDownPressed()) // if DOWN is pressed in the gamepad then move robot backward
{
Serial.print("DOWN");
backward();
}
else if (GamePad.isLeftPressed()) // if LEFT is pressed in the gamepad then move robot LEFT
{
Serial.print("Left");
left();
}
else if (GamePad.isRightPressed()) // if RIGHT is pressed in the gamepad then move robot RIGHT
{
Serial.print("Right");
right();
}
else // stop the robot
{
Serial.println("strop");
Stop();
}
}
void forward() // function for robot forward movement
{
analogWrite(motor1_en,255);
analogWrite(motor2_en,255);
digitalWrite(motor1_dir1,HIGH);
digitalWrite(motor1_dir2,LOW);
digitalWrite(motor2_dir1,HIGH);
digitalWrite(motor2_dir2,LOW);
}
void backward() // function for robot backward movement
{
analogWrite(motor1_en,255);
analogWrite(motor2_en,255);
digitalWrite(motor1_dir1,LOW);
digitalWrite(motor1_dir2,HIGH);
digitalWrite(motor2_dir1,LOW);
digitalWrite(motor2_dir2,HIGH);
}
void left() // function for robot left movement
{
analogWrite(motor1_en,255);
analogWrite(motor2_en,255);
digitalWrite(motor1_dir1,LOW);
digitalWrite(motor1_dir2,HIGH);
digitalWrite(motor2_dir1,HIGH);
digitalWrite(motor2_dir2,LOW);
}
void right() // function for robot right movement
{
analogWrite(motor1_en,255);
analogWrite(motor2_en,255);
digitalWrite(motor1_dir1,HIGH);
digitalWrite(motor1_dir2,LOW);
digitalWrite(motor2_dir1,LOW);
digitalWrite(motor2_dir2,HIGH);
}
void Stop() // // function for no movement
{
analogWrite(motor1_en,0);
analogWrite(motor2_en,0);
digitalWrite(motor1_dir1,LOW);
digitalWrite(motor1_dir2,LOW);
digitalWrite(motor2_dir1,LOW);
digitalWrite(motor2_dir2,LOW);
}
